测绘与地理信息学院学生获“挑战杯”全国大学生课外学术科技作品竞赛专项赛特等奖和最具人气奖
来源:党委宣传部、测绘与地理信息学院
时间:2023-11-20 浏览:
从古至今,人类对月球的好奇与探索从未停止,上九天揽月一直是浪漫梦想。开展多体小型无人巡视器在地外天体表面协同巡视探测的研究是未来深空探测的热点。对单个小型巡视器来说,如何在有限原位计算资源下提升其主动探索能力是应对月表复杂环境的关键所在。对此,同济学子探索了一套智能导航系统,可以让更小、更轻便的月球车更加从容地适应复杂“路况”,在更短时间内探索月球更多未知区域。
同济大学测绘与地理信息学院学生李鹏朔、岑文广、程涛、曹雨泽、宋正翔、李浩腾、龙新迪、朱雨盛、李昱升在学院教师许雄、冯永玖、童小华的指导下,开展了题为《月球就位探测巡视器自主导航与路径规划软硬一体系统》的研究项目,助力月球巡视器高效完成自主导航与路径规划任务。

近日,该项目在第十八届“挑战杯”全国大学生课外学术科技作品竞赛“揭榜挂帅”专项赛中脱颖而出,荣获全国特等奖,并获评“最具人气作品”团队。
自主导航与路径规划系统是保障月球车在未知环境开展大范围安全行驶探测的技术支撑。团队由此着手,他们的目标是——在有限的资源和时间下,让系统控制小型巡视器自主探索更多区域,以实现月表高科学价值和高资源利用价值区域的高效率侦察。
针对设计需求,团队开发的月球就位探测巡视器自主导航与路径规划系统,兼具路径规划算法的稳定性、自主导航避障的高效性和兴趣目标搜索的自主性。

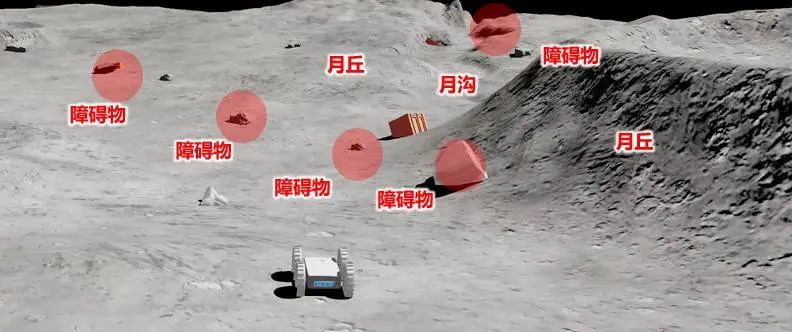
在路径规划方面,团队提出的路径规划算法能够高效、稳定计算出初始点到目标区域中心的最优路线,并可以完全躲避月山、月沟等危险区域。
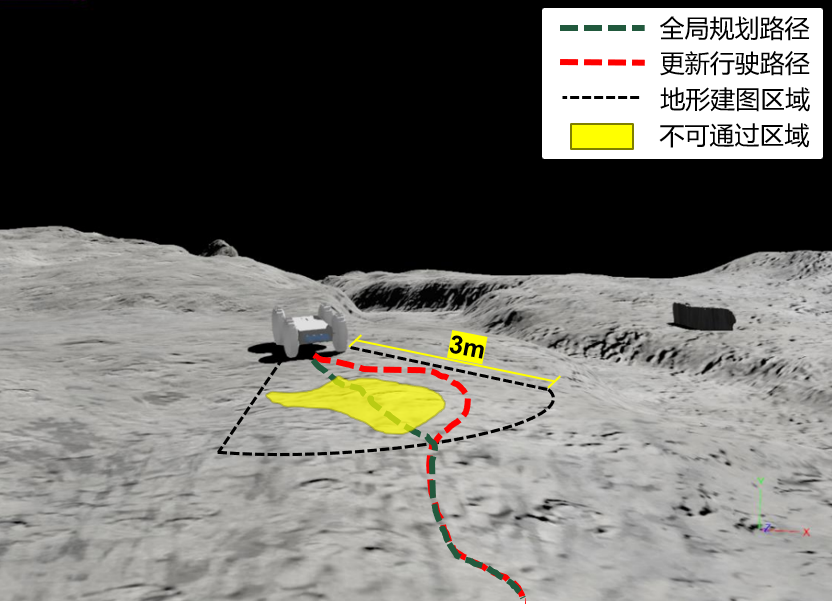
在自主避障方面,团队设计了考虑缓冲区的局部避障算法,根据实时进入的障碍物坐标和范围信息构建障碍物缓冲区,更新可通过性地图并重新计算从当前点到目标区域的重规划路径。团队还设计了目标识别的环拍和抵近策略,结合轮速里程计定位算法,巡视器可以准确避开障碍并开展高效的目标搜索任务。
此外,团队还在同济大学月球与深空探测精密测绘综合实验场开展了验证实验,实体火星车能够成功躲避大面积低洼区域和多个坑石障碍目标,安全稳定到达目标区域。实验结果表明,系统能够适应资源有限下的地外天体巡视探测任务需求。
相关研究成果未来将继续服务于地外天体巡视器自主科学探测等领域,为月表水冰资源勘察与利用、月球科研站建设、火星采样返回等重要实验任务发挥关键“侦察兵”作用。



