【科学网】同济大学研究团队:基于安全合理探索与利用的自动驾驶自进化决策规划Engineering
来源:科学网
时间:2024-11-12 浏览:
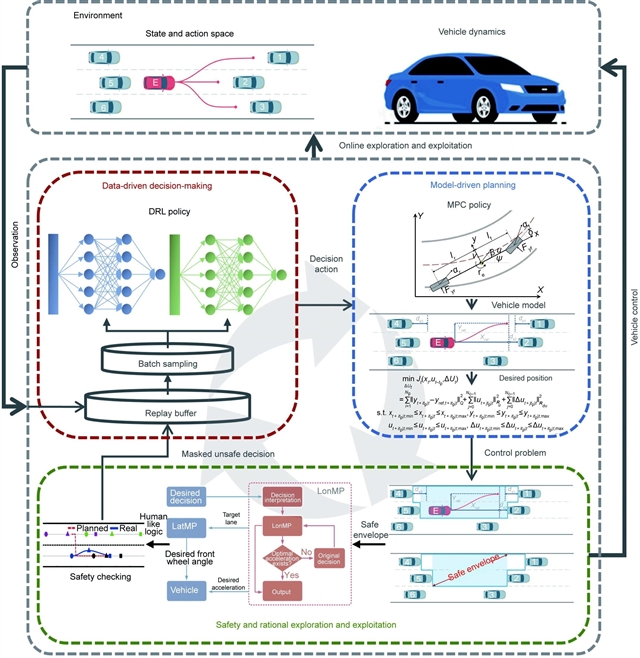
同济大学黄岩军、陈虹研究团队在中国工程院院刊《Engineering》2024年2月刊发《基于安全合理探索与利用的自动驾驶自进化决策规划》一文,指出行为决策和运动规划对于自动驾驶的安全性至关重要。文章提出了一种数据和模型混合驱动的自动驾驶在线决策规划自进化框架。首先,开发了一个基于深度强化学习(DRL)的数据驱动决策模块以尽可能追求合理的驾驶性能。然后,采用模型预测控制(MPC)同时执行纵向和横向运动规划任务,并根据车辆的物理极限定义了多个约束,以满足驾驶任务要求。最后,提出了自动驾驶自进化的安全性和合理性准则。文章建立了安全运动包络并与所提出的合理探索与利用机制集成,规避了不安全的动作,以此过滤不合理的经验,从而为DRL智能体收集高质量的训练数据。在高保真车辆模型和MATLAB/Simulink联合仿真环境下进行了算法验证,结果表明所提出的在线进化框架能够实现更安全、合理、高效的驾驶行为。
链接:https://news.sciencenet.cn/htmlpaper/2024/11/2024118121927542123670.shtm



