汽车学院陈虹、黄岩军团队在《纳米能源》上发表智能人机交互系统最新研究成果
来源:汽车学院
时间:2023-06-09 浏览:
近日,汽车学院2019级本科生陈龙平以第一作者身份,在能源材料领域高水平期刊《纳米能源》(Nano Energy)发表了题为“Triboelectric nanogenerator sensors for intelligent steering wheel aiming at automated driving”的研究论文。该论文是同济大学大学生创新项目的代表性成果,是车辆工程、智能科学与技术等多学科交叉融合的体现,也是校企产学研合作的结晶。其指导老师陈虹教授和黄岩军教授为论文共同通讯作者。
近年来,人工智能、传感方法、通信技术和控制理论的进步加速了自动驾驶车辆的发展。人机交互系统(HMI)是智能汽车的重要组成部分,是人与车之间的重要纽带。HMI的存在能够增强驾驶体验,同时监测驾驶员行为。为了分析驾驶状态,系统需要获取有关环境和驾驶员的信息,因此传感器发挥着至关重要的作用。然而,摄像头和可穿戴设备存在的稳定性、准确性缺陷及对电源的需求限制了传统传感设备的发展,摩擦电纳米传感器(TENG)凭借高灵敏性、小体积、自供电特性应运而生。研究创造性地提出将TENG用于人机交互的首要界面——方向盘上,以期为自动驾驶车辆中HMI系统提供一种紧凑、高效和自供电的解决方案。该研究依托于科技部科技创新2030——“新一代人工智能”重大项目《开放环境下安全可信的人机共驾系统》等项目。
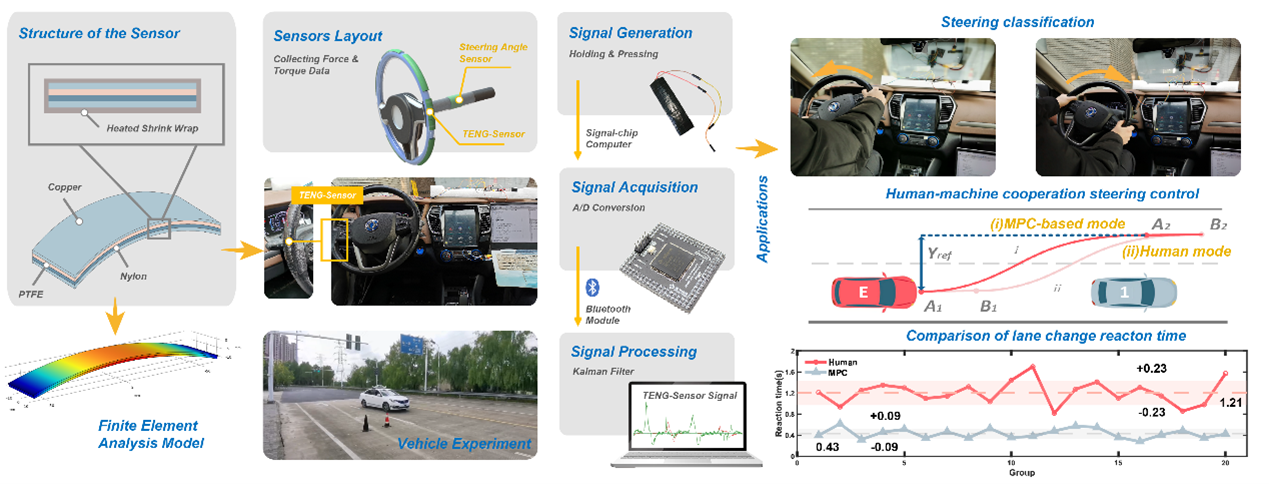
该研究的总体框架如下图所示,将自主设计的TENG布置在方向盘轮缘上,用于采集驾驶员的握持信号,经单片机处理后发送到上位机进行分析。实验结果证明,得益于传感器的高灵敏性和握力变化领先于转角变化的物理特性,TENG的响应时间平均领先传统转轴转角传感器(SAS)0.55s。该提前量有希望用于驾驶员心理层面的预测,为车辆避险和人机协同控制提供一种新的思路。研究将握持信息用于转向动作的识别,比较了多种分类算法,证明了支持向量机(SVM)具有较高的分类精度,可达97.22%。这在交通事故分析和个性化协同驾驶策略等方向具有前景。作为例子,文章介绍了一种使用模型预测控制方法(MPC)和TENG的协同转向控制方案,比较了换道场景下驾驶员独立控制和人机协同控制的反应时间,实验结果证明,协同控制的平均反应时间领先独立控制0.78s,这对于提高车辆高速行驶条件下的操控安全性具有重要意义。
项目团队中的学生成员包括汽车学院2018级本科生陈诗阳、2019级本科生陈龙平、余宁海、莫璟玥。团队自主完成了从调研到传感器制备、模型仿真、硬件设计、算法开发、实验、论文撰写等一系列研究过程,并取得了丰硕成果。
论文链接:https://doi.org/10.1016/j.nanoen.2023.108575



