医工理深度融合,同济团队研发仿生微型手术机器人,为超微创血栓清除提供新型医疗手段
来源:新闻中心、医学院
时间:2020-05-21 浏览:
这是一种体积微小、载有溶栓剂药物的仿生手术机器人,在外加磁场的指挥下,聚集在血栓部位,产生热和力场,成为高效的微血管血栓清道夫。它由同济大学牵头建设的上海自主智能无人系统科学中心微纳无人系统研究团队经医工理深度融合、联合攻关研发而成,可用于医疗靶向微血管溶栓。这一研究成果5月20日23时许(德国时间)在线发表于国际著名学术期刊《先进材料》(Advanced Materials)。
同济大学医学专家介绍,心血管疾病死亡率和致残率高,严重威胁着人类健康。大尺寸血管的血栓可置管溶栓,而对微血管血栓却束手无策。随着医疗机器人趋于微型化,有望为微血管血栓清除提供新手段。微型机器人在人体中处于低雷诺数环境,需要提供连续的外部驱动力来实现驱动。因此,如何实现低雷诺数环境下微尺度机器人的高效驱动和运动控制,是科研中面临的难点。单个微型机器人往往无法满足医疗应用的要求,需要通过操控微型机器人群实现集群效应,来满足生物医用剂量的需求。因此,开发新型的具有生物相容性、能有效驱动和精准控制以及集群操控能力的新型软体医疗微型机器人,是研究的热点问题。
自然界中的趋磁细菌是一类受磁场控制的具有集群行为的天然微机器人,其内部含有磁小体作为驱动和控制单元,能以高度有序的集群方式进行聚集和迁移。受此启发,研究团队研发了一类具有集群行为、模仿趋磁菌内部磁小体有序结构的微型机器人,其材料成份、接触界面和控制方式都具有良好的生物相容性。通过实验方式和数值模拟解析了机器人内部驱动结构、磁场强度及频率对其运动能力的影响,结果显示,其最高运动速度可达161.7微米每秒。在接收到磁场群体性控制命令后,负载溶栓剂的微型机器人可聚集在血栓部位,在高频磁场控制下释放溶栓药物,进行微血管溶栓。
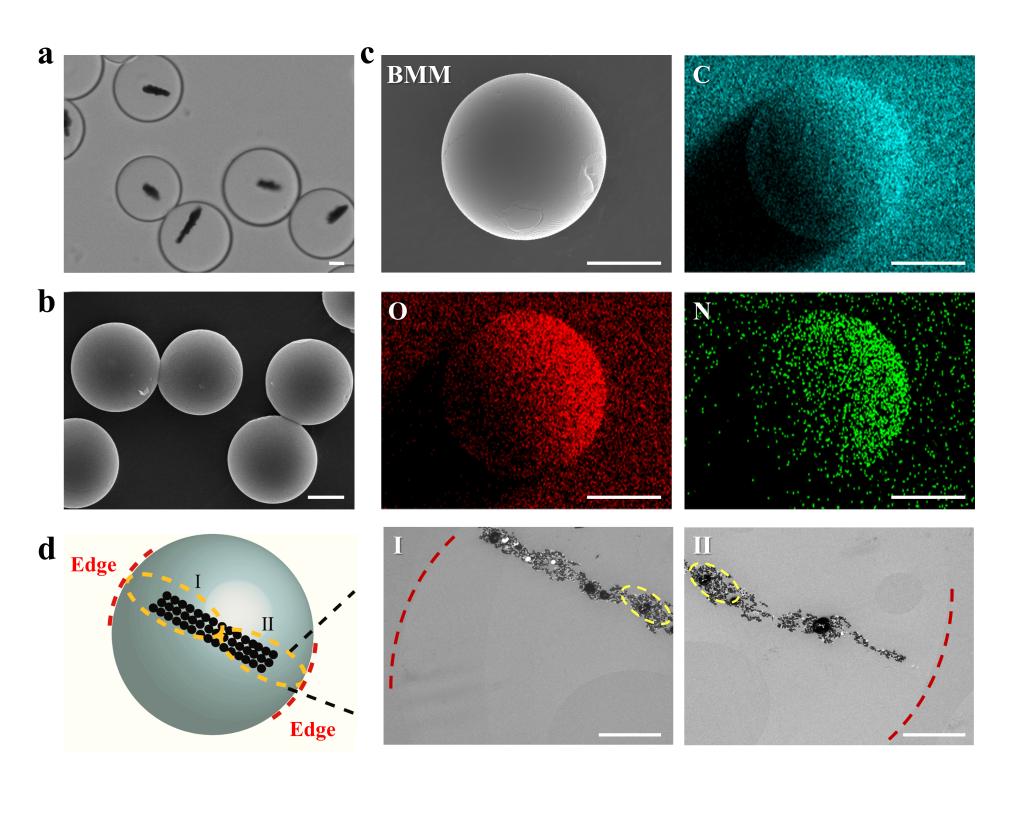
仿趋磁菌软体微型机器人的形态学表征

仿趋磁菌软体微型机器人的设计、制备、磁控及其微血管溶栓应用示意图
研究团队负责人表示,仿生微型手术机器人安全性好,运动控制精准,为超微创血栓清除提供了一种新型医疗手段,将引领新一代精准治疗智能医疗设备的研发热潮。未来研究团队将积极推进这一成果转化应用。
该项目研究依托同济大学牵头建设的上海自主智能无人系统科学中心、同济大学、同济大学附属东方医院,并获得国家自然科学基金、上海市教委科研创新计划重大创新项目、上海市张江国家自主创新示范区专项发展基金重大项目等资助。
论文链接:https://doi.org/10.1002/adma.202000366



