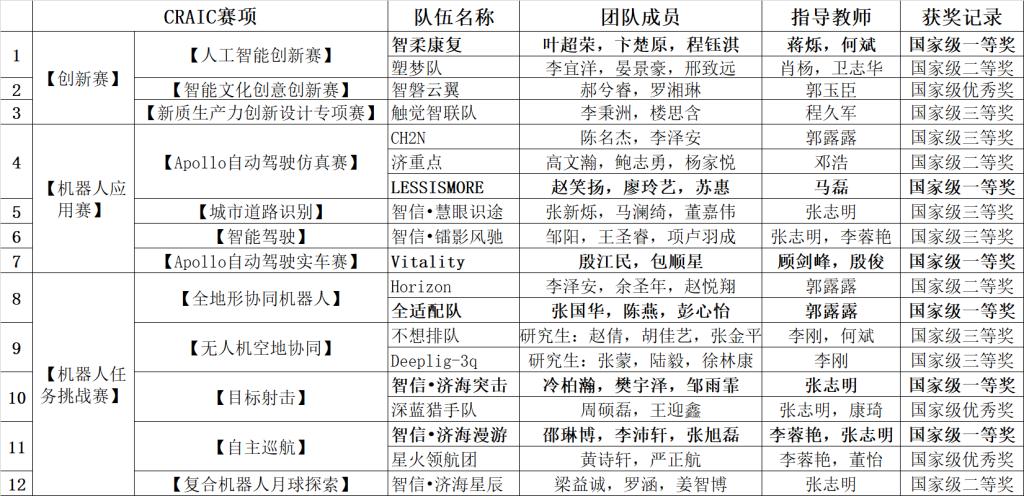
近日,第二十七届中国机器人及人工智能大赛(CRAIC)在苏州、合肥和线上先后举办各个赛项的总决赛,同济大学晋级国赛的队伍积极拼搏,参加涵盖创新赛、应用赛、挑战赛三大类赛道中的12个不同赛项。最终,19支队伍全部获得国家级奖项,包括全国一等奖6项、二等奖4项、三等奖6项和优胜奖3项。
中国机器人及人工智能大赛作为列入中国高等教育学会发布的《全国普通高等学校学科竞赛排行榜》与《全国普通高校大学生竞赛分析报告》的重要赛事,是衡量高校创新人才培养质量的重要指标之一。根据学校关于学科竞赛工作的统一部署,电子与信息工程学院作为该项赛事的校内组织单位,充分发挥学科优势,联合计算机科学与技术学院、中德工程学院、上海自主智能无人系统科学中心等多学科力量,共同打造跨学科竞赛育人平台,以赛促教,竞教结合,努力推动机器人与人工智能领域的教学改革与实践育人工作。
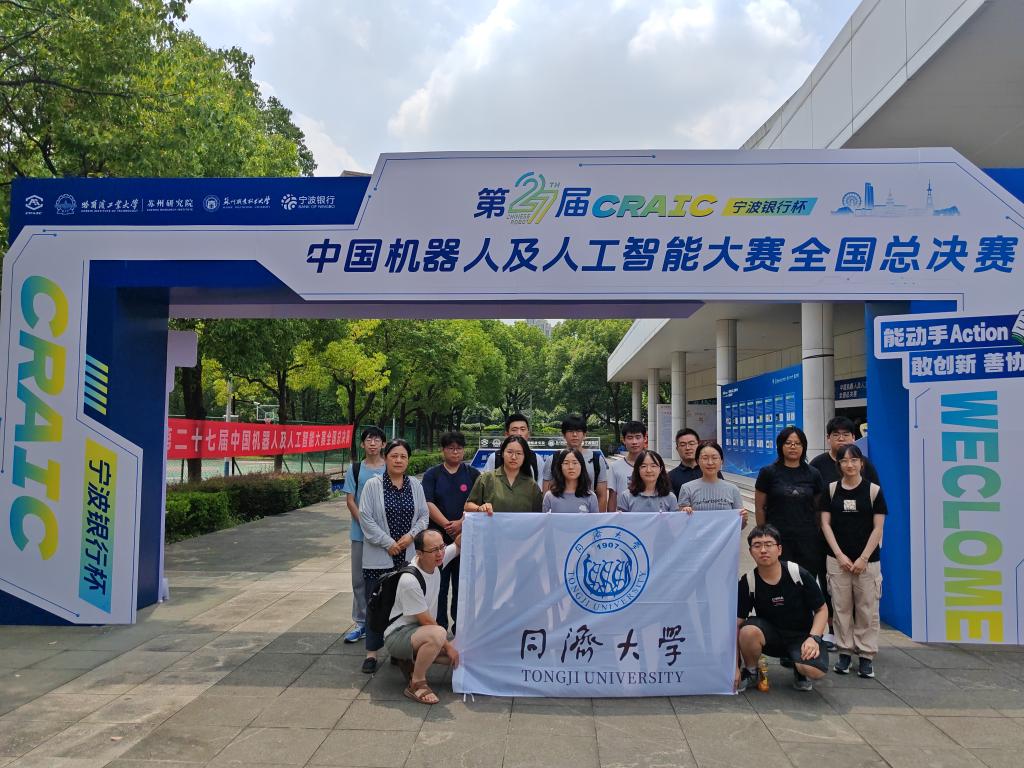
全国总决赛(苏州)同济参赛师生合影
全国一等奖作品
比赛项目:创新赛道人工智能创新赛赛项
队伍名称:智柔康复队
指导教师:蒋烁 副教授(电子与信息工程学院)、何斌 教授(电子与信息工程学院)
团队成员:
电子与信息工程学院本科生 叶超荣(微电子科学与工程)
电子与信息工程学院本科生 卞楚原(自动化)
计算机科学与技术学院本科生 程钰淇(计算机科学与技术)
项目/作品简介:
项目设计并实现一套多模态感知与柔顺控制驱动的上肢康复评估一体化平台,可为脑卒中后上肢功能障碍患者提供从多关节训练到量化评估的完整方案,平台融合视觉、肌电与惯性测量单元的多模态数据,实现肩、肘、腕关节的协同训练;通过自适应柔顺控制算法,动态调整训练阻力,确保训练动作安全性和个性化。学生团队展现卓越的工程实践与创新能力,自主完成硬件集成、控制算法开发及临床数据验证,演示平台对患者多关节协同训练的实时响应与智能评估。
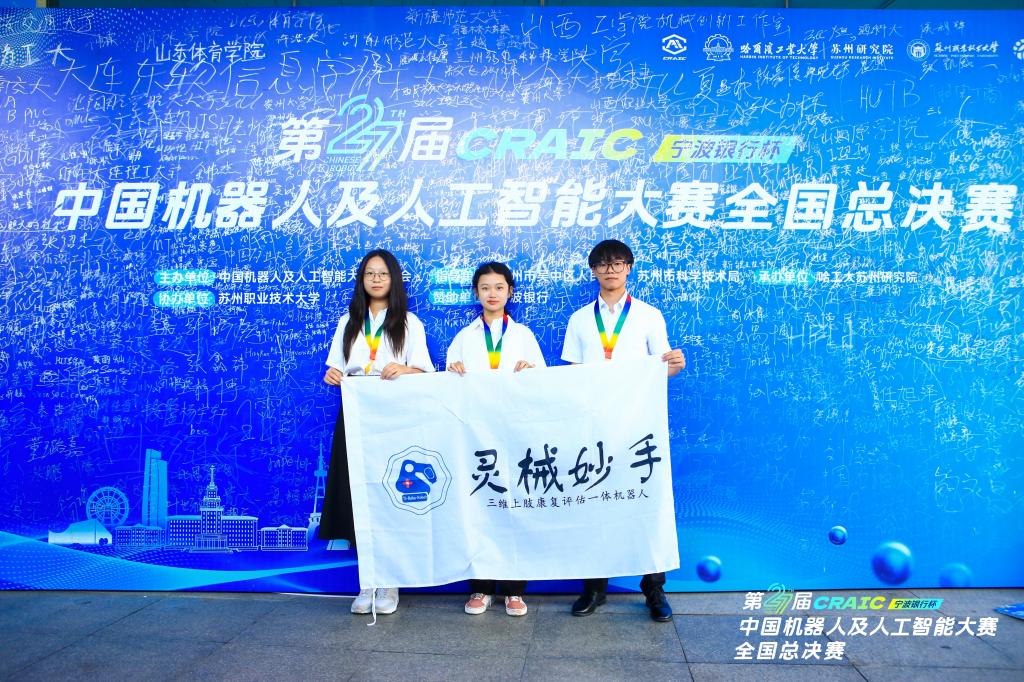
从左到右:程钰淇、卞楚原、叶超荣
全国一等奖作品
比赛项目:机器人应用赛道Apollo自动驾驶实车赛赛项
队伍名称:vitality队
指导教师:顾剑峰 工程师(中德工程学院)、殷俊 工程师(中德工程学院)
团队成员:
中德工程学院本科生殷江民(汽车服务工程)
中德工程学院本科生包顺星(汽车服务工程)
项目/作品简介:
赛事围绕自动驾驶车辆在城市道路的行驶场景,开展自动驾驶软件算法研究,竞赛所用地图场景由百度Apollo绘制并提供,参赛选手需按照赛题要求,基于本地竞赛环境进行代码编写与硬件设备连接调试,进行实车行驶验证,本赛项旨在锻炼学生自动驾驶软件算法开发与硬件调试能力。参赛队员在指导老师的悉心指导下,紧密结合《项目管理》课程实践研究,放弃节假日休息时间,成功攻克程序编写、软硬件协同调试等多个技术难题,团队表现卓越,再创佳绩。
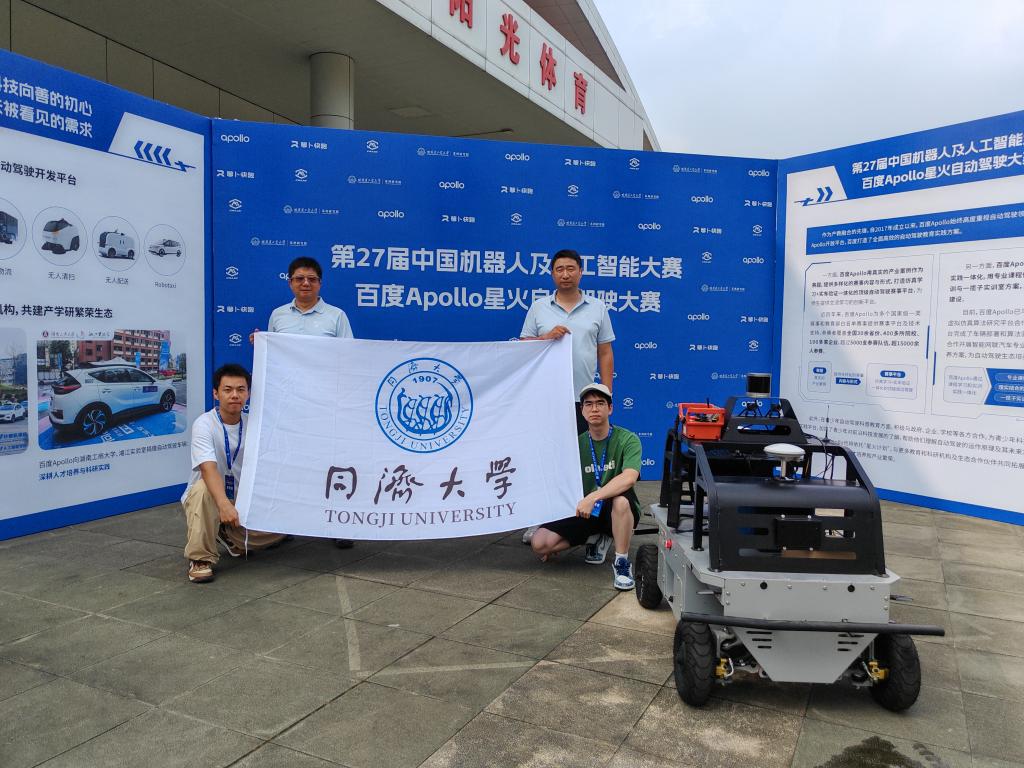
前排从左到右:殷江民、包顺星,后排:顾剑峰、殷俊
全国一等奖作品
比赛项目:机器人应用赛赛道Apollo自动驾驶仿真赛赛项
队伍名称:LESSISMORE队
指导教师:马磊 助理教授(电子与信息工程学院)
团队成员:
电子与信息工程学院本科生赵笑扬(人工智能)
计算机科学与技术学院本科生廖玲艺(数据科学与大数据技术)
计算机科学与技术学院本科生苏惠(数据科学与大数据技术)
项目/作品简介:
比赛聚焦最前沿的自动驾驶技术,依托百度Apollo开放平台,旨在考验参赛队伍在复杂城市交通环境下的感知、决策与控制综合能力。要求参赛车在虚拟高保真环境中,面对动态变化的交通流、行人以及多变的道路状况,完成一系列高难度城市驾驶任务。团队针对比赛中的技术难点,精研算法,在自主泊车、施工区域等场景下实现自主规划路径。在决策规划上,采用先进的路径规划与行为决策算法,确保车辆在十字路口、交通灯及拥堵路段等复杂场景下,能够做出安全、高效的通行决策。
从左到右:马磊、赵笑扬、苏惠、廖玲艺
全国一等奖作品
比赛项目:机器人任务挑战赛赛道全地形协同机器人赛项
队伍名称:全适配队
指导教师:郭露露 特聘研究员(电子与信息工程学院)
团队成员:
电子与信息工程学院本科生张国华(人工智能)
电子与信息工程学院本科生陈燕(自动化)
电子与信息工程学院本科生彭心怡(自动化)
项目/作品简介:
设计并编程两辆协同作业的比赛车:一辆蓝牙遥控车与一辆自主智能车,在循迹导航、二维码扫描、物块抓取、颜色识别匹配、精准投掷等环节紧密配合,跨越台阶、急弯、陡坡、管道、栅格等全地形障碍。在结构上兼顾通过性与稳定性,控制程序融合路径规划、避障与任务衔接等多种算法。三位队员分工明确,从机械结构优化、传感器调试、算法编写到实地测试,持续攻克难题,不断提升车辆性能。最终,两车高效稳定完成全部任务,成功通过所有障碍,充分体现了团队的创新力、工程实践能力与拼搏精神。

从左到右:彭心怡、陈燕、张国华
全国一等奖作品
比赛项目:机器人任务挑战赛赛道自主巡航赛项
队伍名称:智信•济海漫游队
指导教师:李蓉艳 讲师(电子与信息工程学院)、张志明 副教授(电子与信息工程学院)
团队成员:
计算机科学与技术学院本科生邵琳博(计算机科学与技术)
电子与信息工程学院本科生李沛轩(自动化)
电子与信息工程学院本科生张旭磊(自动化)
项目/作品简介:
构建智能运动控制系统:基于SLAM技术,融合多传感器数据(如IMU、里程计、激光雷达),通过全局路径规划算法,系统能够自主计算最优行驶路径,并结合局部动态避障策略,确保机器人在复杂环境中安全、高效地完成巡航任务;创新性构建多模态识别系统:系统采用多模态识别策略,按照优先级依次进行模式匹配(传统模板匹配)、视觉大模型识别(基于深度学习的通用图像理解)和AR码识别(基于编码特征检测),实现对比赛现场实时发布的任务图像的精准识别。

从左到右:张旭磊、邵琳博、李沛轩
全国一等奖作品
比赛项目:机器人任务挑战赛赛道目标射击赛项
队伍名称:智信•济海突击队
指导教师:张志明 副教授(电子与信息工程学院)
团队成员:
电子与信息工程学院本科生冷柏瀚(人工智能)
电子与信息工程学院本科生樊宇泽(自动化)
电子与信息工程学院本科生邹雨霏(人工智能)
项目/作品简介:
目标射击是一项高度专业化与技术密集型的竞赛,参赛者通过先进算法控制机器人实现对移动目标的精准识别、追踪与射击。全面考验团队在机器人动态控制、实时数据处理、图像识别及机器学习等多方面的技术能力。首先通过语音唤醒接收指令;随后自主导航依次抵达各任务点,并借助传感器与视觉技术精准识别定位;在不同任务点分别完成对环形计分靶、旋转靶和移动标靶的识别、瞄准与射击,在规定时间内按流程完成全部动作,最终抵达终点。
从左到右:樊宇泽、冷柏瀚、邹雨霏



